Acoustic Detectors in Detect3D
Detect3D uses two variables to model the polar plot representing the field-of-influence for the acoustic detector: Range and Up Range.
The Range is defined as the lower extents of the field of influence, as shown in the image below. The left image shows the polar plot of an example detector. Each ring represents a distance, here the Range value is 13 meters. The right image shows what the variable will represent in Detect3D. Note that this is measured from the device itself and not from the ground level.
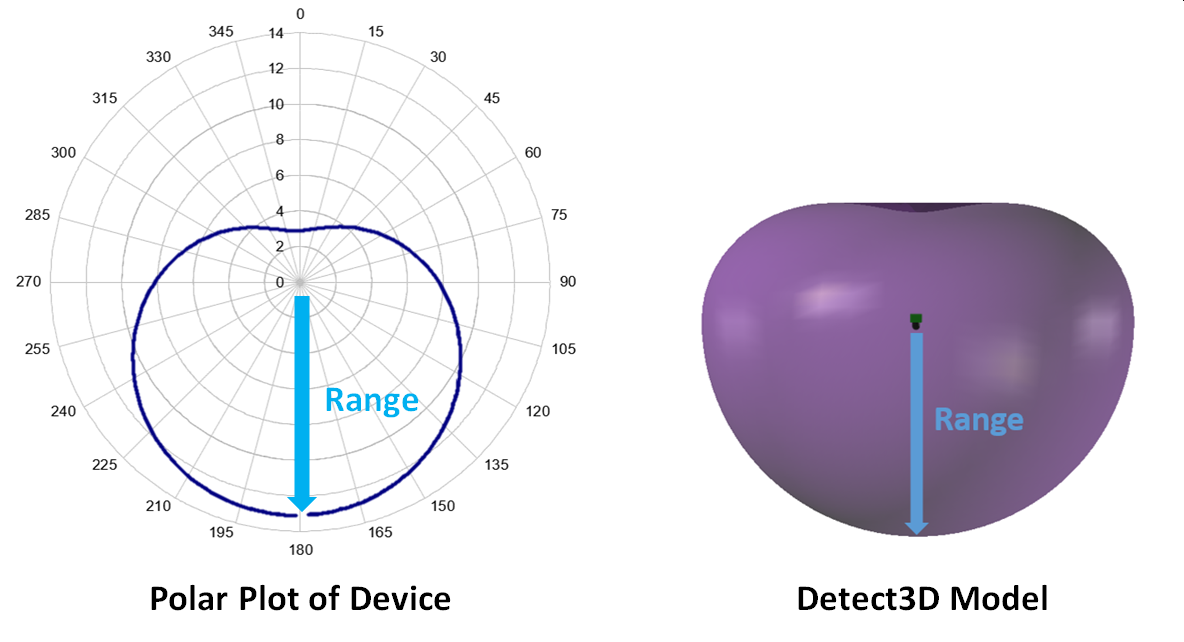
Tutorial 9 - Figure 02 - Description of the Range variable for defining ultrasonic leak detectors in Detect3D
The Up Range is defined as the distance from the device to the upper limit of the field-of-influence. This value changes the curvature of the polar plot. The left image shows the up range of the polar plot to be a value of 3 meters. Entering this value will squish the top of the circle to make more of an apple shape to match the polar plot. The right image shows the equivalent in Detect3D.
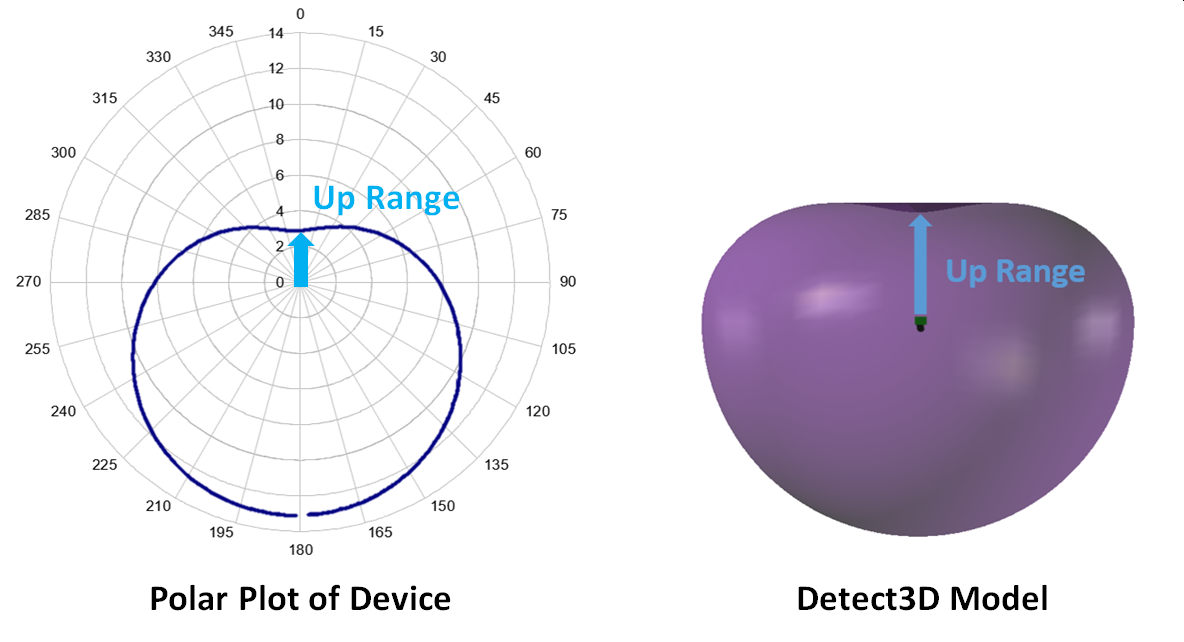
Tutorial 9 - Figure 03 - Description of the Up Range variable for defining ultrasonic leak detectors in Detect3D
Smaller values of the Up Range variable will result in more curvature at the top of the field of influence. Below are two examples of Up Range values shown as a comparison. To create a perfect sphere (without any inward curvature) set the Up Range value to equal the Range value.
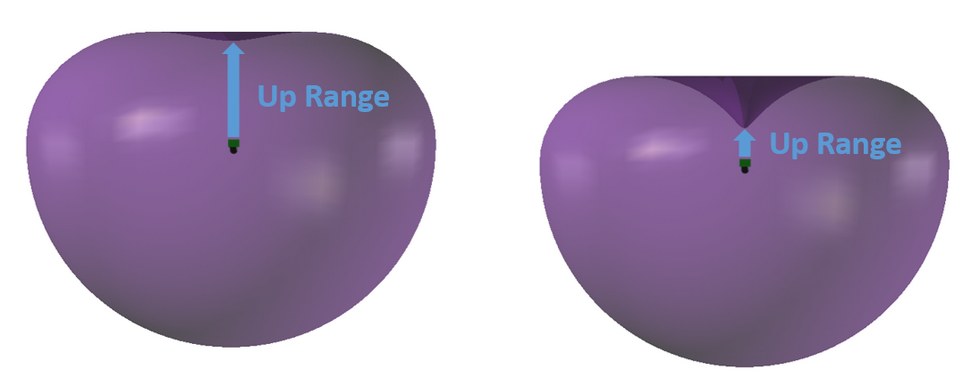
Tutorial 9 - Figure 04 - Comparison of two different Up Range values and how they affect curvature of the polar plot
Azimuth and Elevation values can also be used to tilt the acoustic device in various directions. As with flame detectors, a value of 0 degrees for the Azimuth is pointed in the positive y-direction with increasing angles going clockwise, e.g. positive x-direction is then 90 degrees. Additionally, a positive Elevation value represents and upwards tilt in degrees of the field of influence.
Continue to the next section to add an acoustic detector to Detect3D.