Zone Coverage Calculation for F&G Mapping in Detect3D
There are two methods for calculating zone coverage for fire and gas mapping in Detect3D - point method and the fire area method. Depending on your project, you may want to consider using one method over the other as there are pros/cons to each.
General Theory
Zones can be defined anywhere in your project. They can vary in size but be wary about adding large zones to your project as doing so can increase computation time. See the notes regarding zone and geometry distribution for more information.
Zones are cuboid based regions but can have volumes removed from them (null zones) to make more unique shapes. Additionally sub divided regions, called sub-zones can be defined around equipment or other items within the zone. Whichever coverage method is used for the parent zone will be applied to the sub-zones within it.
Coverage Calculation - Point Cloud Method
Each zone contains an evenly spaced point cloud. These points are discretizing or mathematically dividing up the volume and are not meant to represent fire as a point but more dividing up the zone volume geometrically. The spacing between the points is the resolution of the zone. This resolution value also affects the number of points in the zone. Detect3D calculates the visibility of each detector to each point in the zone to determine coverage, further described below. Computation time will increase with the number of points in the zone.
Coverage values are calculated by comparing the total number of points in the zone's point cloud to the number of points visible by the detectors in the project.
For a single detector, 1ooN coverage can be determined using the following calculation:

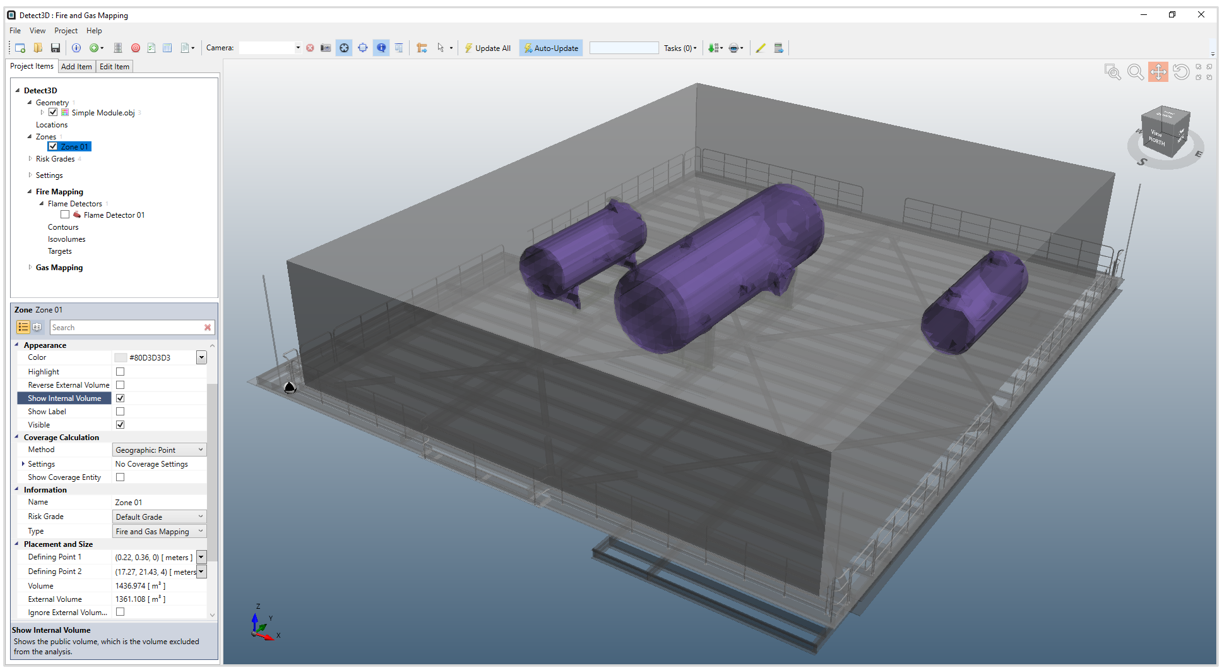
However, when a zone is defined, Detect3D automatically calculates which points are internal to the CAD geometry file and which points are external. The purple region below gives an example of the internal volume of a zone. Internal volume calculation is described further here.
Therefore, the calculation performed by Detect3D for the 1ooN coverage is:

taking into account the internal volume of the zone.
The same is applied for the sub-zone calculation, using the total number of points within the subzone as the basis.
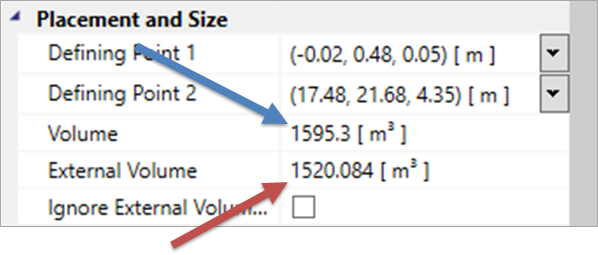
The total volume of the zone (blue arrow) and the external volume (removing the internal volumes, red arrow) are listed in the properties panel, shown below.
Coverage Calculation - Fire Area Method
Rather than having a point in space recording coverage, users may define a size of fire (width x height) in which to perform the analysis for. The Geographic: Area (Variable) method has the user define the size of fire which needs to be 100% visible at the detector's maximum range in order for it to go into alarm.
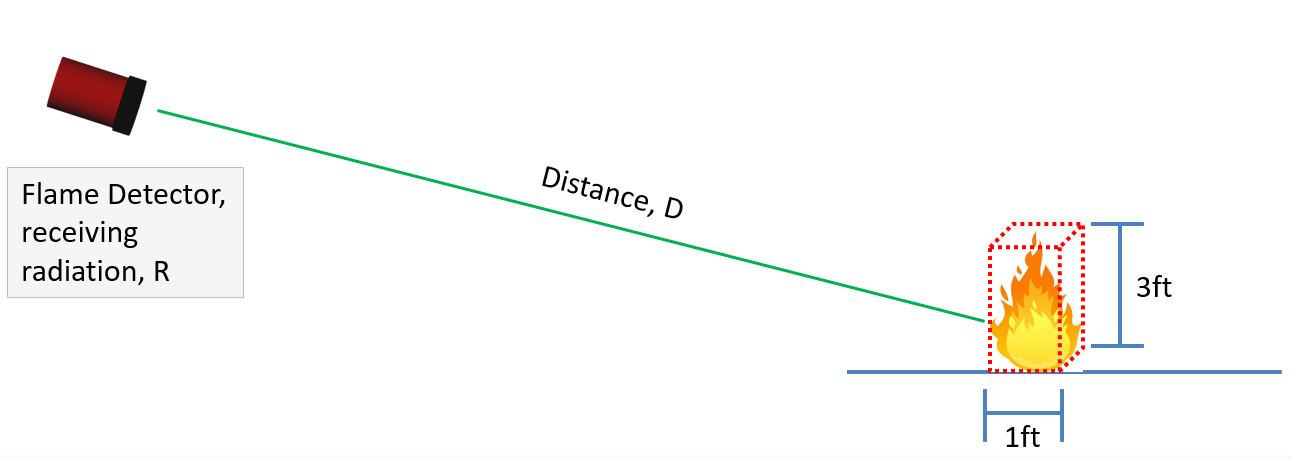
The inverse square law is then applied for how much of the defined surface area of fire needs to be visible for the detector to go into alarm based on the distance it is away from the detector. More information about the fire area method is available in Tutorial 13 and this page.
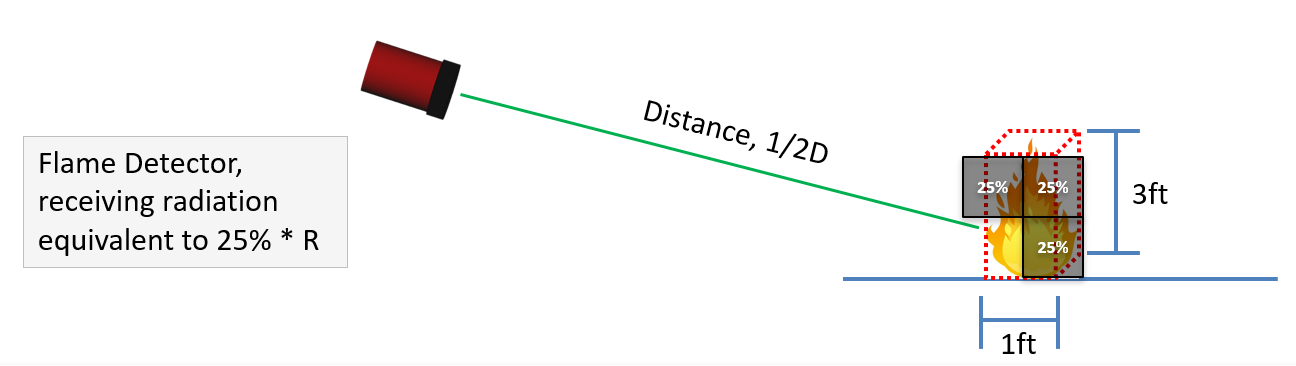
In the example above, 25% of the original fire area size needs to be visible to the detector for it to go into alarm. This is based on the inverse square law rule that reducing the distance of the detector by half reduces the radiation intensity needed by 1/4th.
With the Geographic: Area (Variable) method the Visibility at Max Range % may be adjusted, via the zone property panel, to change the percentage of the fire that needs to be visible at the detectors maximum range. The example above shows 100% visibility at maximum range, which is the default value. This value is generally changed if the fire area sized used differs greatly from that which the detector was tested for. If this Visibility at Max Range % value is lowered it is stating that the entered fire area size is smaller than what the maximum range of the flame detector was tested for.
The Geographic: Area (Fixed) method does not take into account the inverse square law, meaning that a fixed percentage (the Acceptance %) of the fire area must be visible at all points in the zone, regardless of how the distance from the detector. The percentage may be changed based on the requirements of the project, e.g. when considering jet fires, a small portion of a large jet fire can set the detector into alarm.
For both fire area methods, the base of the fire area is placed at each point in the zone. Points near the top of the zone may have the fire area extend above the zone. For the example above, the highest point in the zone will have the fire area extending 3ft above the highest point in the zone. Care needs to be taken to ensure that the zone height is appropriately applied as the fire area may extend above decks in some cases.
Coverage then is determined in the same way as the point cloud - if the point where the fire area exists meets the criteria for being visible (as described in the paragraphs above) then that point contributes to the volume representing 1ooN, 2ooN, etc. Internal volumes are appropriately removed as well with this calculation method.
If a sub-zone is added to a zone with the calculation method set to one of the fire area methods, then coverage for the sub-zone will also be calculated using the fire area method.